



La segunda versión de un control foto-eléctrico (por luz) de un motor usando un transistor Darlington se muestra en la figura 1. (La primera es MIN508S)
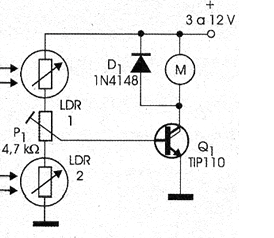
En este caso, la alta ganancia del transistor usado permite que sea excitado directamente por el LDR sin la necesidad de pasos adicionales de amplificación.
Una característica importante de este circuito es su funcionamiento diferencial con dos sensores, lo que permite su uso en aplicaciones interesantes. El uso de dos sensores hace que el circuito tenga cuatro modos de operación posibles:
a) Dos LDR en la oscuridad - el motor permanece parado
b) El LDR 1 recibe luz y el LDR2 permanece en la oscuridad - el motor se acciona
c) El LDR 1 está iluminado con el motor en funcionamiento y el LDR2 está en la oscuridad. Cuando el LDR2 recibe suficiente luz, el motor se corta (se detiene)
d) El LDR 1 tiene poca luz y el LDR2 iluminado. Cuando la luz en el LDR2 se corta, el motor entra en funcionamiento.
e) Los dos LDR están iluminados - dependiendo de su intensidad y del ajuste de P1 el motor puede o no funcionar.
Entre las aplicaciones posibles para este circuito está un robot que puede tomar decisiones en función de la luz que él "ve" a través de los sensores (LDR).
En la figura 2 tenemos el montaje de este circuito en un puente de terminales que es la versión indicada a los lectores menos experimentados y con menos recursos.

Para los que deseen, existe la posibilidad de hacer el montaje en placa de circuito impreso o matriz de contactos.
Para motores superiores a 200 mA será conveniente dotar al transistor de un radiador de calor. El ajuste del punto de funcionamiento se realizará en el trimpot.
Lista de material
Q1 - TIP110 o equivalente - Transistor Darlington de potencia NPN
D1 - 1N4148 - diodo de uso general
LDR1, LDR2 - LDR comunes
P1 - 4,7 k ohms (o mayor) - trimpot o pote
M - Motor común de 3 y 12 V
Varios:
Puente de terminales, alimentación de 3 a 12 V, radiador de calor para el transistor, hilos, soldadura, etc.
