



Los circuitos integrados de temporización como el 555 no atienden a las aplicaciones más críticas que requieren largos intervalos de tiempo o temporización precisa. Para estos casos, en que tiempos de más de una hora son necesarios, los circuitos especiales deben ser proyectados, ya sea con base en la frecuencia de referencia de la red de energía como de las señales generadas por osciladores controlados a cristal. En este artículo describimos algunos circuitos de temporización precisa que se basan en el divisor de frecuencia CMOS 4020.
Para generar temporizaciones largas, circuitos integrados basados en constante de tiempo RC, como el 555 no ofrecen la precisión exigida por aplicaciones más críticas como las encontradas en la industria.
Los circuitos de este tipo dependen de fugas de los capacitores, precisión de los componentes usados y en temporizaciones por encima de 1 hora no ofrecen seguridad alguna de funcionamiento.
Para temporizaciones largas y con precisión la mejor tecnología es la que hace uso de bases de tiempo precisa como la red de energía y divisores de frecuencia con circuitos digitales, como muestra la figura 1.
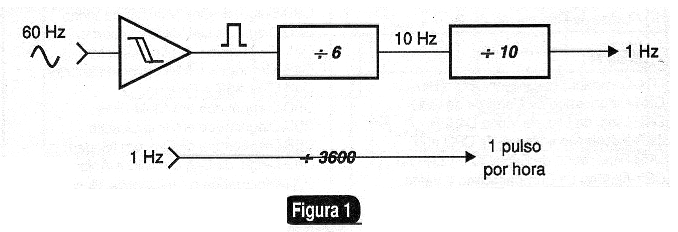
Por ejemplo, para obtener una temporización de 1 hora (3 600 segundos) simplemente utilizamos un oscilador preciso de 1 Hz y un divisor de frecuencia por 3 600. Al final del circuito obtenemos un pulso cada 3 600 de entrada, es decir, pulso por hora, que puede ser utilizado para disparar la aplicación deseada.
Obtener los circuitos
Con componentes comunes no tenemos grandes dificultades en obtener osciladores de 1 Hz controlados a cristal y ni de obtener esa frecuencia a partir de los 60 Hz de la red de energía. Comenzamos por un circuito que permite obtener 1 Hz a partir de los 60 Hz de la red de energía.
En la figura 2 tenemos entonces una etapa que transforma la señal sinusoidal de 60 Hz obtenida en el secundario de un pequeño transformador, en una señal rectangular compatible con la tecnología CMOS.
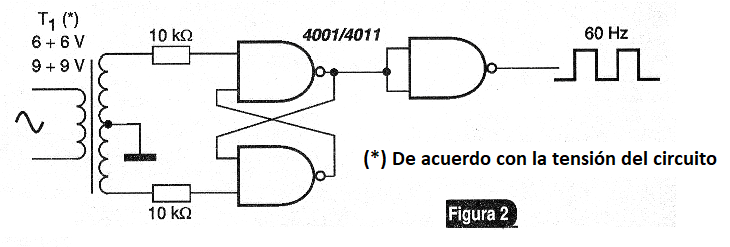
Esta señal se aplica en un divisor por 6 y luego en un divisor por 10, obteniéndose así una señal de 60 Hz. El ciclo activo de la señal obtenida no es del 50%, pero esto no es tan importante en la aplicación, ya que sólo se utilizará para excitar los siguientes bloques de cuenta que harán los tiempos más largos.
Podemos ir más allá, para el caso de que no necesite una definición de 1 segundo en la temporización y hacer nueva división por 10, como muestra la figura 3.
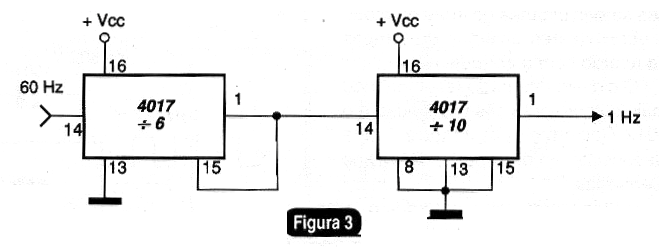
En ese caso, tenemos un pulso cada 10 segundos, lo que nos lleva a la posibilidad de proyectar un temporizador con pasos de 10 segundos.
Vea que la contaje del 4017 puede ser programada para cualquier valor entre 2 y 10, lo que significa que se puede criar diferentes pasos de temporización en un circuito, como muestra la figura 4.
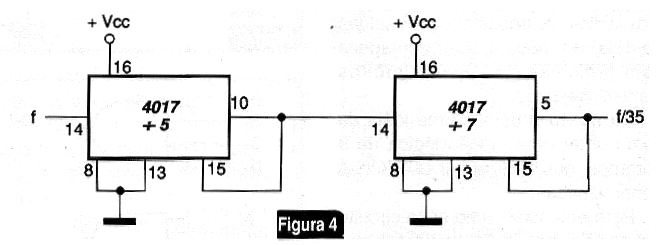
Por ejemplo, si queremos pasos de 35 segundos, bastará hacer la división por 5 y 7. En un CI conectamos la quinta salida al reset y en la séptima salida al reset. Con eso, tenemos la producción de 1 pulso de salida cada 35 de entrada.
Es claro que estos tiempos son pequeños, y si queremos tiempos largos los circuitos integrados de estos bloques de entrada no se aplican. Para temporizaciones largas tenemos la posibilidad de contar con el circuito integrado 4020.
Los circuitos integrados 4020
Los circuitos integrados CMOS 4020, 4040 y 4060 están formados por contadores binarios con diversas etapas, destinados precisamente a hacer la división de frecuencia de señales lógicas que se apliquen a su entrada o aún el conteo de pulsos.
Analizamos cada uno por separado, antes de dar las aplicaciones en tiempo.
a) 4020
El circuito integrado 4020 está formado por un contador de par de 14 etapas con los pinos mostrados en la figura 5.
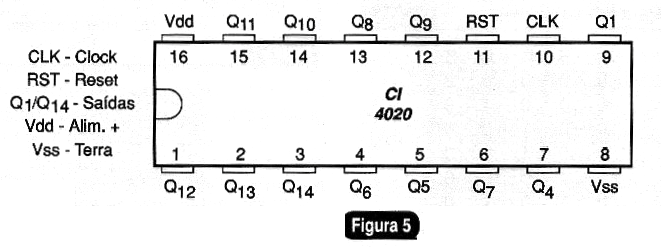
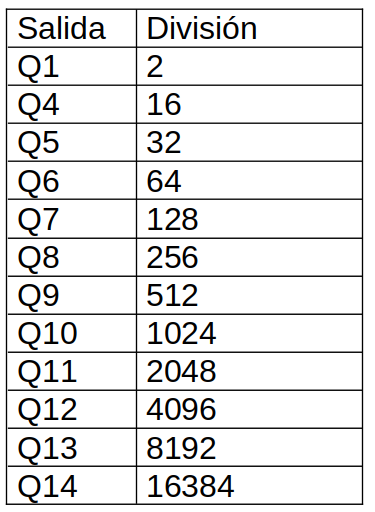
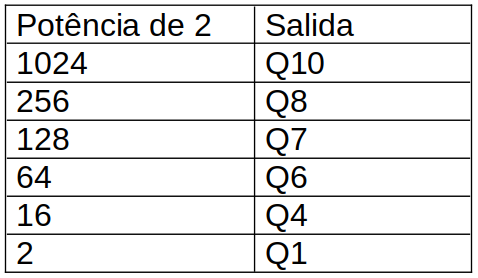
Con 14 etapas, cada una haciendo la división de la señal por 2, llegamos a 214 = 16 384, lo que quiere decir que, en principio podemos usar ese CI para hacer la división de frecuencia de una señal por cualquier señal que sea potencia de 2 hasta 16 384, según la tabla I:
Ver que no hay salidas para las divisiones por 4 y 8 (Q2 y Q3).
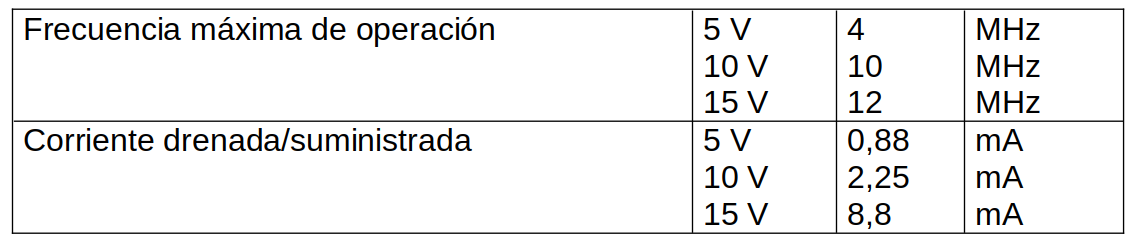
Como cualquier componente de la familia CMOS el 4020 puede ser alimentado con tensiones de 3 a 15 V y la frecuencia máxima de operación depende de la tensión de alimentación, según la siguiente tabla, en la que también damos las corrientes máximas que se pueden obtener en las salidas:
En la operación normal, el Reset se conecta a tierra. Para poner a cero el circuito se debe llevar al nivel alto por un instante. El circuito avanza una unidad en la cuenta en la transición negativa del pulso de entrada.
En las salidas, partiendo de todas con el nivel 0, los niveles van pasando a 1 según el recuento binario de las muñecas.
Uso del 4020
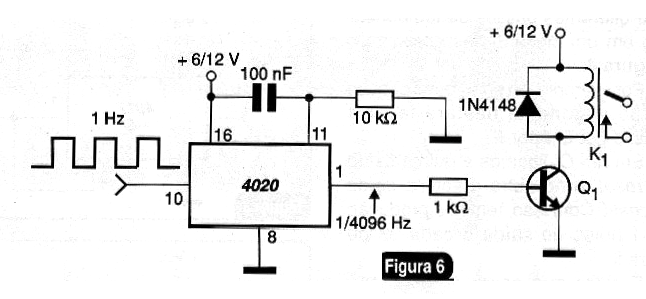
Evidentemente, la forma más simple de usar el 4020 en una temporización larga es conectar directamente un circuito de excitación de relé en la salida correspondiente. Así, en la figura 6, tenemos un temporizador que acciona un relé por un cierto intervalo de tiempo cada 4096 segundos, ligándolo a la base del transistor a Q12.
Sin embargo, 4096 no es un valor común en las exigencias de los proyectos que pueden necesitar tiempos "enteros" como 1 minuto, 10 minutos, media hora, una hora o dos horas (e incluso más). Cómo obtener estos valores en segundos (60, 600, 1800, 3600 o 7200) a partir de las salidas del 4020?
La solución a este problema está en el uso de un puerto CMOS adicional que puede combinar los valores de las salidas binarias del 4020 para obtener valores diferentes de tiempos de acuerdo con la entrada.
El circuito integrado recomendado más común para esta aplicación es el 4012. Como muestra la figura 7, este CI consiste en dos puertas NAND de 4 entradas.
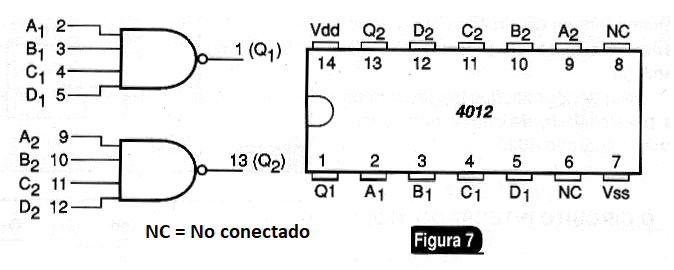
Combinando estas entradas con una puerta NAND como el 4001, podemos fácilmente trabajar con 8 salidas del 4020 para obtener cuentas muy próximas a valores enteros como deseamos.
En la figura 8 damos una idea de cómo obtener una función lógica de 8 entradas que se puede utilizar en los temporizadores.
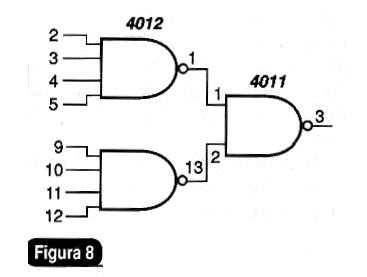
Para entender cómo funciona este circuito, vamos a partir de la tabla real de una de las puertas del 4012.
Tabla II:

Como podemos ver por la tabla, obtenemos el nivel alto en la salida solamente cuando todas las entradas están en el nivel alto. Tomando esto al 4020 y inicialmente trabajando con sólo 4 salidas, supongamos que deseamos una temporización 336 segundos de forma precisa. 336 segundos puede ser descompuesto en factores que son potencia de 2, a partir de la tabla I de la siguiente manera:
336 = 256 + 64 + 16 + 2
Ahora bien, por la tabla:
256 = Q8
64 = Q6
16 = Q4
2 = Q1
Sólo hay que conectar las entradas de una de las puertas del 4012 a las salidas Q1, Q4, Q6 y Q8 para obtener la temporización desde una entrada de 1 Hz.
Evidentemente, para garantizar que la partida de la temporización se haga a partir de 000 .... 000 es necesario agregar la red mostrada en la figura 9.
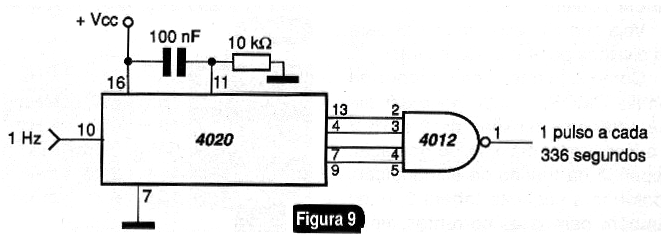
Este circuito restablece la cuenta cuando se enciende la alimentación.
Observe, sin embargo, que "demos suerte" de nuestro ejemplo, no necesitamos contar con las salidas Q2 y Q3 de división por 4 y 8 y que sólo necesitamos 4 salidas combinadas para obtener la temporización necesaria.
En el primer caso, si necesitamos contar con las salidas de peso 4 y 8 segundos, dependiendo de la aplicación, una diferencia de ese valor en la temporización puede ser tolerada y el valor final puede ser aproximado sin su uso.
En el segundo caso, podemos usar los dos puertos existentes en el 4012 y combinarlos en la salida usando un puerto NAND. Vamos a dar un ejemplo, en el que se utilizan los dos puertas:
Necesitamos una temporización de 1500 segundos (25 minutos) que se obtendrá a partir de una señal de 1 Hz aplicada en la entrada del circuito.
¿Cuáles deben ser las salidas del 4020 usadas en ese caso y cómo debemos usar el 4012 en su combinación?
Los 1500 segundos pueden ser descompuestos en potencias de 2, conforme la siguiente tabla que ya tiene en cuenta las salidas del 4012:
Vamos a usar 4 entradas de una de las puertas y otra de la otra puerta. Sin embargo, las entradas no utilizadas del segundo puerto no deben quedar libres. Para mantener la función deseada, conectamos al positivo de la alimentación (nivel alto) las puertas no usadas, como muestra la figura 10.
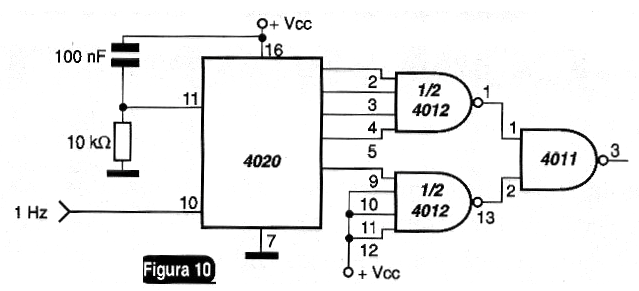
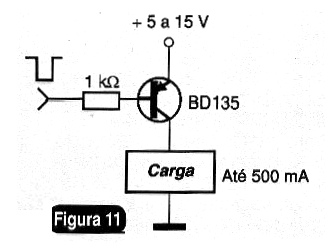
El resultado final es que, teniendo en cuenta la función NAND la salida final del circuito irá al nivel bajo, cada 1500 pulsos de entrada del temporizador. El circuito controlador para accionar una carga en el nivel bajo es el mostrado en la figura 11.
Por supuesto, si los pulsos de entrada tienen una frecuencia más baja, 0,1 Hz o un pulso cada 10 segundos la temporización se multiplicará por 10, es decir, tendremos un pulso cada 15.000 segundos, o 250 minutos (6 horas y 10 minutos)
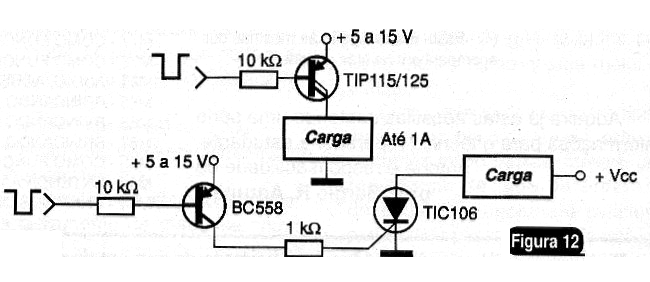
Los circuitos integrados 4011 y 4012 pueden ser alimentados con tensiones de 3 a 12 V y en su salida obtenemos las mismas corrientes del 4020 lo que posibilita el accionamiento directo de diversas etapas de potencia como las mostradas en la figura 12.
Observe sin embargo que el ciclo activo de las configuraciones obtenidas varía bastante según el circuito. Así, podemos decir que, dependiendo de las salidas usadas, los clocks de la carga pueden variar entre algunos segundos hasta el máximo.
Por ejemplo, si la salida menor utilizada es la Q6, podemos garantizar que la carga se activará por un tiempo equivalente a 64 ciclos de la señal de entrada.
Esto debe ser considerado cuando vamos a controlar algún dispositivo externo directamente por la salida CMOS obtenida. Si deseamos tener independencia en el accionamiento debemos optar por monoestable o circuitos con traba que sean accionados con el pulso obtenido al final de la temporización.
Un ejemplo de circuito con traba es justamente lo que hace uso de un SCR en el control de la carga,
Conclusión
El lector ya debe haber percibido que basta con combinar las salidas del 4020 con funciones lógicas comunes y aplicar en su entrada pulsos de frecuencias exactas para obtener temporizaciones precisas. Evidentemente, el único obstáculo para tener tiempos absolutamente exactos en algunas aplicaciones es la ausencia de las divisiones por 4 y 8 en la salida del 4020, pero ciertamente, dependiendo de la aplicación, esto puede ser contorneado.
Nota:
Hay otros dos circuitos integrados CMOS de la misma serie del 4020 que también se pueden utilizar en las aplicaciones que describimos.
El primero de ellos es el 4040 que consiste en un divisor contador de 12 etapas y que cuenta con las dos salidas que faltan en el 4020, aunque sólo alcanza la división hasta 4096. El otro es el 4060 que además de los 14 estadios divisores ya posee un oscilador interno, si bien es del tipo RC.
Bibliografía:
CMOS Sourcebook - Newton C. Braga - Prompt Publications - Ver libros extranjeros en este sitio (www.newtoncbraga.com.br)
